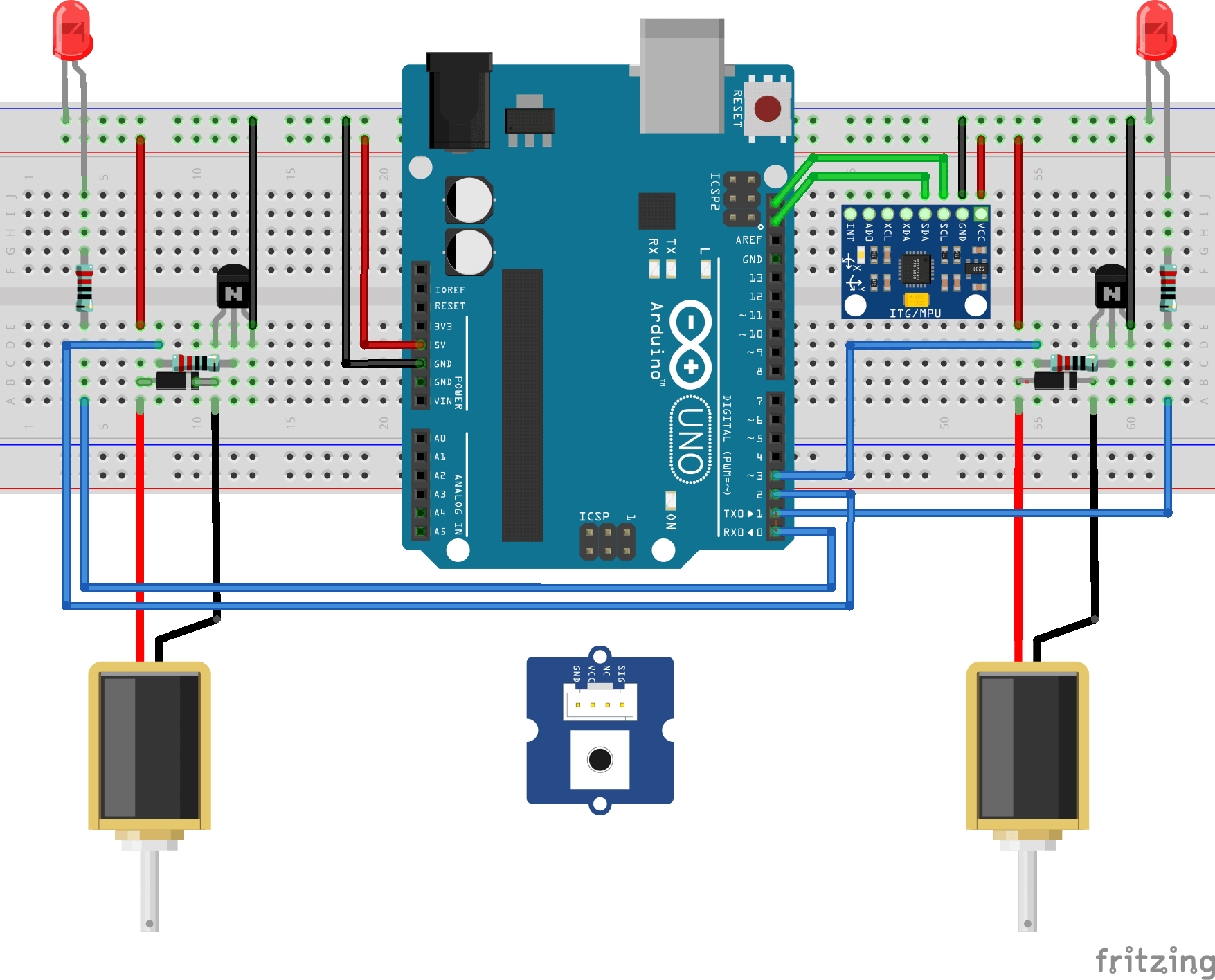
// MPU 6050 ---> Arduino
//
// VCC -----> 3.3v
// GND -----> GND
// SCL -----> A5 pin
// SDA -----> A4 pin
#include <Wire.h>
const int MPU = 0x68; // I2C address of the MPU-6050
int32_t AcX, AcY, AcZ, Tmp, GyX, GyY, GyZ, button;
// value returned is in interval [-32768, 32767] so for normalize multiply GyX and others for gyro_normalizer_factor
// float gyro_normalizer_factor = 1.0f / 32768.0f;
int led1Pin = 0;
int led2Pin = 1;
int solenoid1Pin = 2;
int solenoid2Pin = 3;
int buttonPin = 7;
int buttonInterval = 100;
void setup()
{
pinMode(led1Pin, OUTPUT);
pinMode(led2Pin, OUTPUT);
pinMode(solenoid1Pin, OUTPUT);
pinMode(solenoid2Pin, OUTPUT);
pinMode(buttonPin, INPUT);
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(57600);
Serial.flush();
}
int checkButton()
{
unsigned long currentMillis = millis();
static unsigned long previousMillis = 0;
int buttonState = digitalRead(buttonPin);
int currentState = digitalRead(solenoid1Pin);
if (currentMillis - previousMillis >= buttonInterval && buttonState == HIGH)
{
previousMillis = currentMillis;
if (currentState == LOW)
{
digitalWrite(led1Pin, HIGH);
digitalWrite(led2Pin, HIGH);
digitalWrite(solenoid1Pin, HIGH);
digitalWrite(solenoid2Pin, HIGH);
}
else
{
digitalWrite(led1Pin, LOW);
digitalWrite(led2Pin, LOW);
digitalWrite(solenoid1Pin, LOW);
digitalWrite(solenoid2Pin, LOW);
}
}
return buttonState;
}
void sentSensorData()
{
//read MPU450's accelerometer and sent it to serial port
Wire.beginTransmission(MPU);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU, 14, true); // request a total of 14 registers
//accelerometer
AcX = Wire.read() << 8 | Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY = Wire.read() << 8 | Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ = Wire.read() << 8 | Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
button = checkButton();
Serial.print(AcX);
Serial.print(";");
Serial.print(AcY);
Serial.print(";");
Serial.print(AcZ);
Serial.print(";");
Serial.print(button);
Serial.println(";");
//Serial.print(int16_t(5)); Serial.print(";"); Serial.print(int16_t(10)); Serial.print(";"); Serial.print(int16_t(15)); Serial.println(""); //temp
//gyroscope
//Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
//GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
//GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
//GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
//Serial.print(GyX); Serial.print(";"); Serial.print(GyY); Serial.print(";"); Serial.print(GyZ); Serial.println("");
}
void loop()
{
sentSensorData();
Serial.flush();
delay(20);
}